Research Theme and Approach
We rely on a highly interdisciplinary approach to examine motor learning – combining tools from kinesiology, movement neuroscience, and biomedical engineering. We use a combination of experimental techniques such as motion capture, robotics, and virtual reality to precisely measure and characterize the process of motor learning. In addition to measuring behavior, we also use analysis techniques to further probe the mechanisms underlying motor learning.
A common theme that cuts across many of the projects we study is the issue of ‘motor redundancy’ – i.e., how the nervous system learns and retains movement patterns when there are multiple ways to achieve the same task goal. This issue has implications for understanding how experts can be ‘flexible’ in their movement patterns while still producing consistent outcomes, and designing human-machine interfaces that can potentially take advantage of this redundancy in the motor system.
Our work has been supported by funding from agencies such as the National Science Foundation and the National Institutes of Health.
Motor learning and Human-machine interaction
Aspelund, S., Patel, P., Lee, M. H., Kagerer, F. A., Ranganathan, R., & Mukherjee, R. (2020). Controlling a robotic arm for functional tasks using a wireless head-joystick: A case study of a child with congenital absence of upper and lower limbs. PLoS one, 15(8), e0226052. [Link]
Ranganathan, R., Lee, M. H., Padmanabhan, M. R., Aspelund, S., Kagerer, F. A., & Mukherjee, R. (2019). Age-dependent differences in learning to control a robot arm using a body-machine interface. Scientific Reports, 9 (1),1960. [Link]
Lee, M. H., Ranganathan, R., Kagerer, F., & Mukherjee, R. (2016). Body-machine interface for control of a screen cursor for a child with congenital absence of upper and lower limbs: a case report. Journal of NeuroEngineering and Rehabilitation, 13, 1. [Link]
Ranganathan, R., Wieser, J., Mosier, K. M., Mussa-Ivaldi, F. A., & Scheidt, R. A. (2014). Learning redundant motor tasks with and without overlapping dimensions: Facilitation and interference effects. Journal of Neuroscience, 34, 8289-8299. [Link]


We have used two experimental paradigms to investigate how humans learn to control human-machine interfaces-(a) using a glove to control a cursor, and (b) using the torso to control a robotic arm.
Motor variability and learning
Pagano, M., Stochino, G., Casadio, M., & Ranganathan, R. (2022). Motor memory consolidation after augmented variability depends on the space in which variability is introduced. Neuroscience, 479, 169-179. [Link]
Ranganathan, R., Lin, M., Carey, S., Lokesh, R., Lee, M. H., & Krishnan, C. (2022). Motor variability prior to learning does not facilitate the ability to adopt new movement solutions. Neuroscience, 479,157-168. [Link]
Lokesh, R., & Ranganathan, R. (2020). Haptic assistance that restricts the use of redundant solutions is detrimental to motor learning. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 28(6), 1373–1380. [Link]
Ranganathan, R., Lee, M. H., & Newell, K. M. (2020). Repetition without repetition: Challenges in understanding behavioral flexibility in motor skill. Frontiers in psychology, 11, 2018. [Link]


We have used the KINARM bimanual robot to understand the effect of variability in motor learning. The robot can measure but also perturb movements as participants learn a virtual shuffleboard task.
Stroke rehabilitation
Jayasinghe, S. A. L., Wang, R., Gebara, R., Biswas, S., & Ranganathan, R. (2021). Compensatory trunk movements in naturalistic reaching and manipulation tasks in chronic stroke survivors. Journal of Applied Biomechanics, 37(3), 215-223. [Link]
Ranganathan, R., Gebara, R., Andary, M., & Sylvain, J. (2019). Chronic stroke survivors show task-dependent modulation of motor variability during bimanual coordination. Journal of Neurophysiology, 121, 756-763. [Link]
Ranganathan, R., Wang, R., Dong, B., & Biswas, S. (2017). Identifying compensatory movements in the upper extremity using a wearable sensor system. Physiological Measurement, 38, 2222-2234. [Link]
Ranganathan, R. (2017). Reorganization of finger coordination patterns through motor exploration in individuals after stroke. Journal of Neuroengineering and Rehabilitation, 14, 90. [Link]
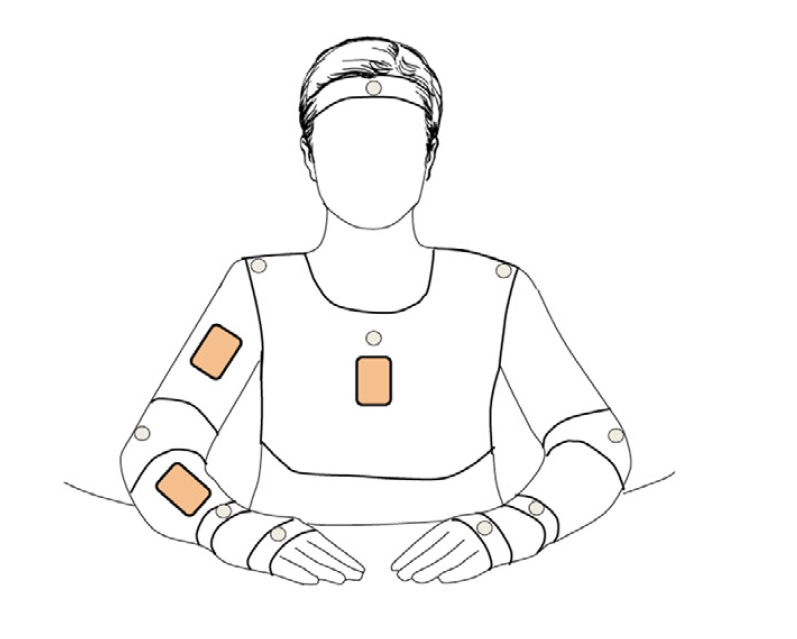

We have developed a sensor system capable of detecting compensatory movements during naturalistic reaching and manipulation tasks. We have also examined coordination deficits by looking at reaching trajectories in the affected and unaffected hands of stroke survivors during shared bimanual tasks.
Meta-Science of Motor learning
Ranganathan, R., Cone, S., & Fox, B. (2022). Predicting individual differences in motor learning: A critical review. Neuroscience and Biobehavioral reviews, 141, 104852. [Link]
Ranganathan, R., Lee, M.-H., & Krishnan, C. (2022). Ten guidelines for designing motor learning studies. Brazilian Journal of Motor Behavior, 16(2), 112–133. [Link]
Ranganathan, R., Doherty, C., Gussert, M., Kaplinski, E., Koje, M., & Krishnan, C. (2022). Scientific basis and active ingredients of current therapeutic interventions for stroke rehabilitation. Restorative Neurology and Neuroscience, 40, 97-107. [Link]
Ranganathan, R., Tomlinson, A. D., Lokesh, R., Lin, T. H., & Patel P. (2021). A tale of too many tasks: task fragmentation in motor learning and a call for model task paradigms. Experimental Brain Research, 239(1), 1-19. [Link]
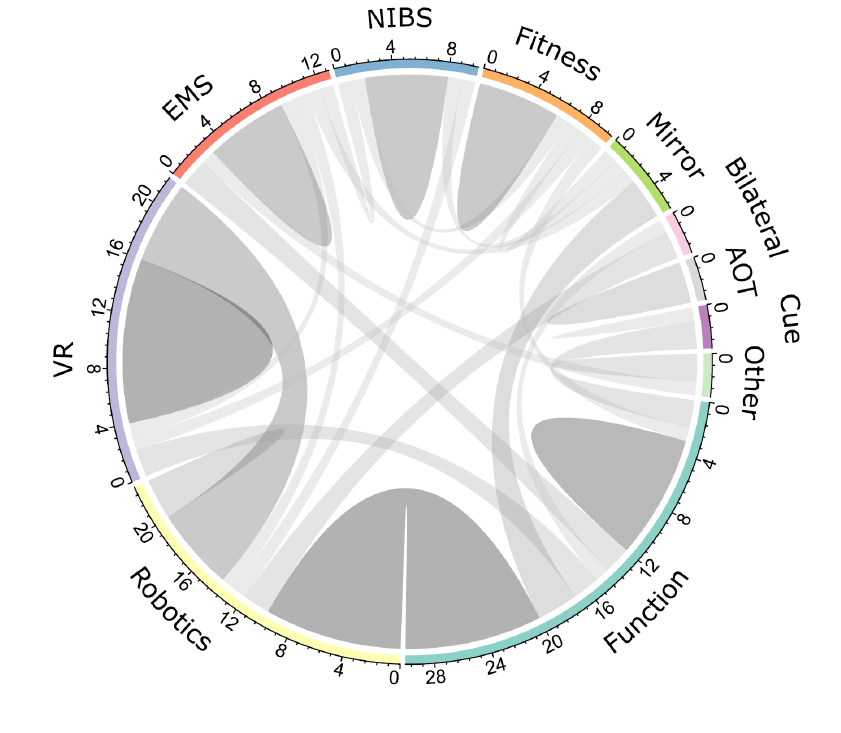
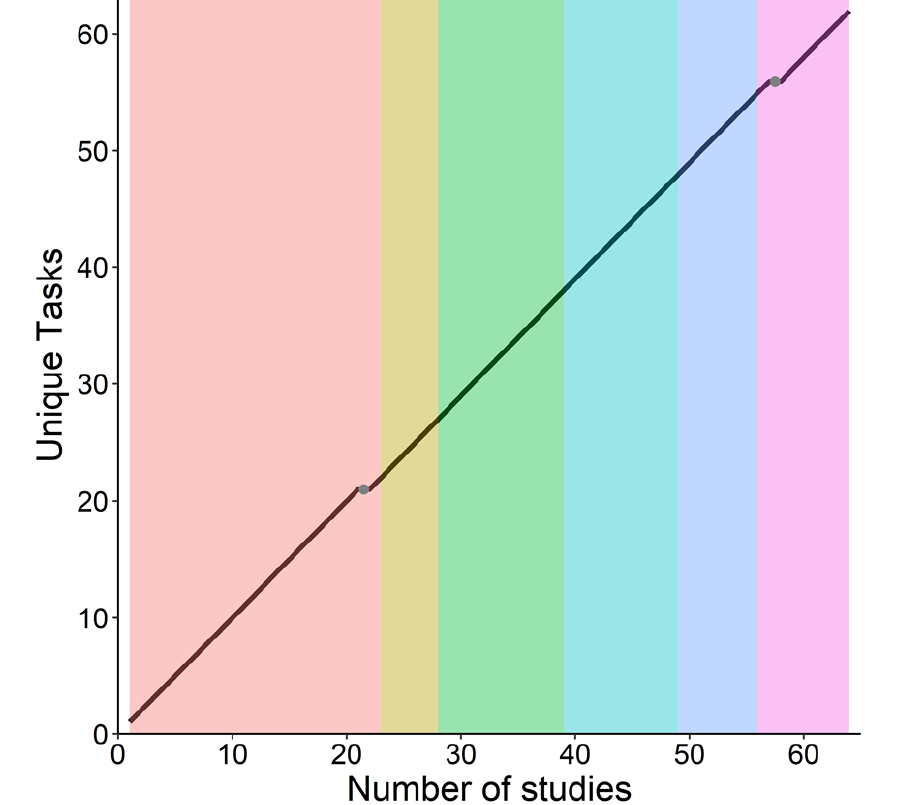
We have used a meta-science approach to examine published literature in motor learning and rehabilitation. The top panel shows different combinations of therapies that have been tried in stroke rehabilitation work. The bottom panel shows the large number of unique motor tasks used in motor learning studies. We view meta-science as an important aspect of improving the work in our field.
Resources
The lab is equipped with an 8-camera motion capture system (Motion Analysis Corporation, Santa Rosa, CA) to analyze 3D movements as well as provide feedback of these movements in real-time. There is a force plate (AMTI, Watertown, MA) embedded in the floor that is used to measure postural control, a 16-channel wireless EMG system (Delsys, Natick, MA) to measure muscle activity, and wearable activity monitors (Actigraph, Pensacola, FL). We also have virtual reality systems (HTC Vive Pro and Oculus Quest 2) for creating virtual environments.
We also have a bimanual robot manipulandum (KINARM, BKIN Technologies, Kingston, ON) that is integrated with a virtual reality system. We can perturb participants’ arm movements to assess sensorimotor function as well as create mechanical environments for enhancing motor learning and rehabilitation.


STEM Outreach
In addition to our research, we also regularly participate in STEM outreach events and activities involving middle and high school students and the general public. We regularly participate in events like the MSU Science Festival, Grandparents University, and the Math, Science and Technology Program.
